
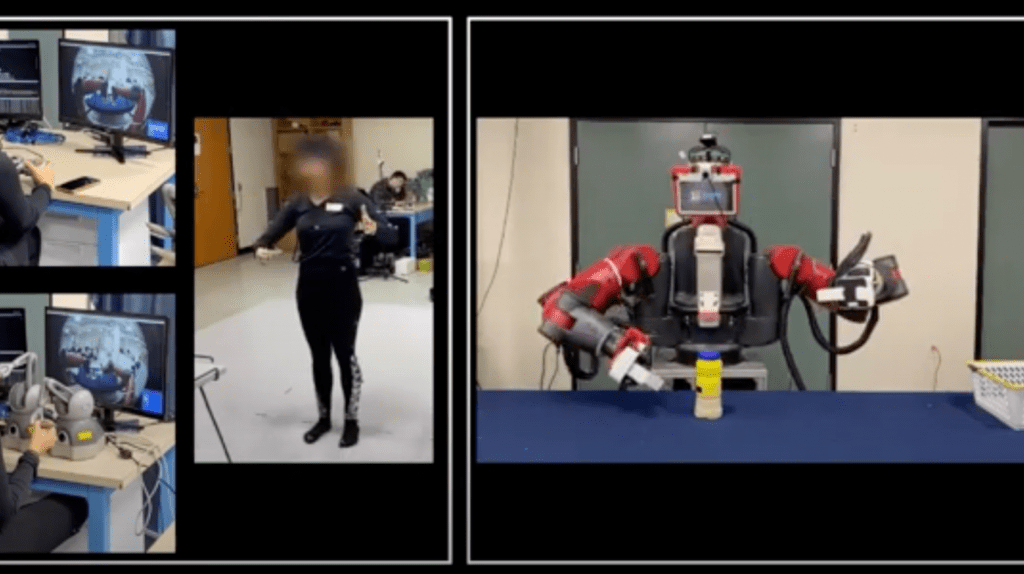

See how TRINA, the tele-robotic intelligent nursing assistant can be operated using different interfaces such as a game controller, stylus, and motion mapping to complete tasks. Which interface do you think will work best?

My research bridges the gap between human-robot interaction and human movement science. I am particularly interested in the design of human-robot interfaces and assistive robot autonomy, based on the understanding of the perception-action coupling of humans and cyber-human systems. At WPI, I primarily work on tele-nursing robots and assisted teleoperation interfaces. I also have extensive experience in exoskeletons for rehabilitation and tele-surgical robots. Learn more.