
With this work, we take steps towards making systems usable enough to operate safely, effectively, and consistently, and facilitate wider adoption of safety-critical technology.

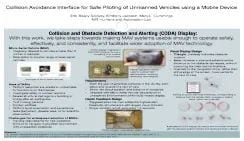
Autonomous robots and vehicles can perform tasks that are unsafe or undesirable for humans to do themselves, such as investigate safety in nuclear reactors or assess structural damage to a building or bridge after an earthquake. In addition, improvements in autonomous modes of such vehicles are making it easier for minimally-trained individuals to operate the vehicles. As the autonomous capabilities advance, the user’s role shifts from a direct teleoperator to a supervisory control role. Since the human operator is often better suited to make decisions in uncertain situations, it is important for the human operator to have awareness of the environment in which the vehicle is operating in order to prevent collisions and damage to the vehicle as well as the structures and people in the vicinity. The Collision and Obstacle Detection and Alerting (CODA) display is a novel interface to enable safe piloting of a Micro Aerial Vehicle with a mobile device in real-world settings.