Robot for Detection of Landmines



Tele-Robotic System for Waste Disposal

Envelope Packaging Robotic Solution



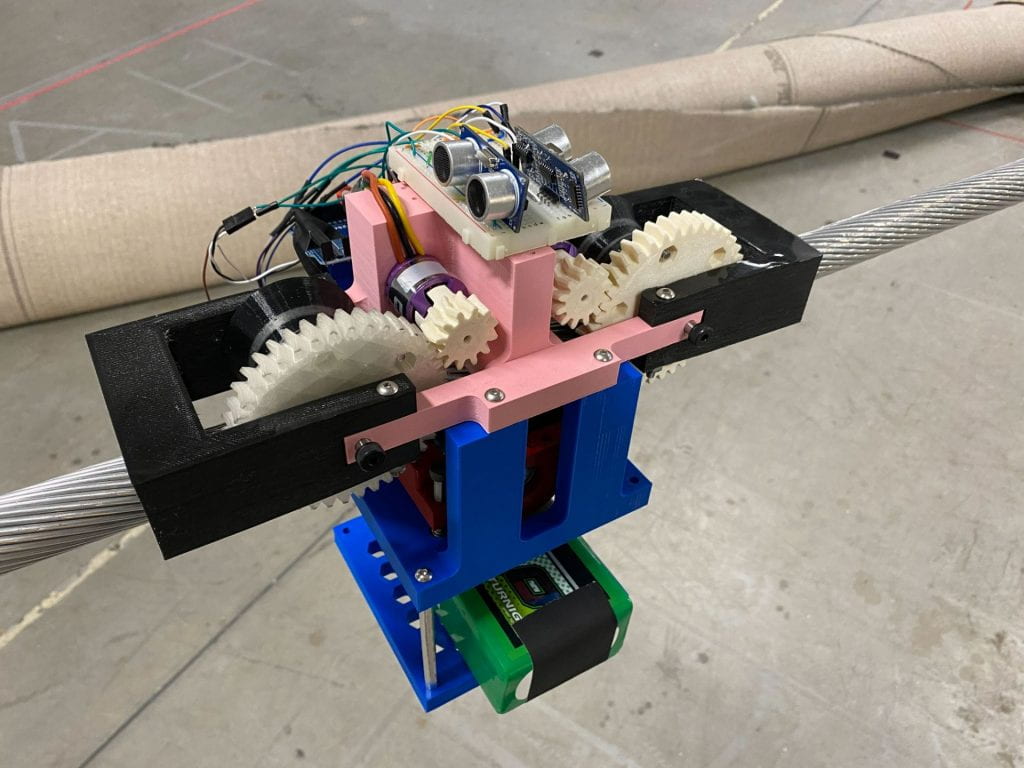
WireInspect: Autonomous Thin Wire Inspection using Aerial Robots



Multi-Robot Collaborative Active Inspection



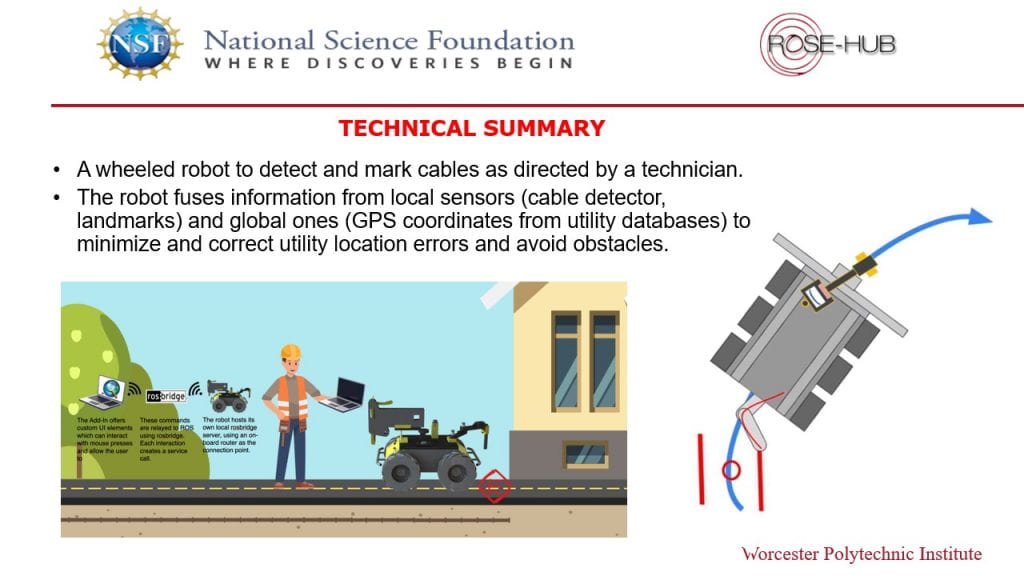
Robot-assisted Dig Safe


Robotic Bird Deterrent


Robotic Cutting for Metal Scrap Recycling
This is a project to develop a semi-autonomous robotic cutting system to be used in the Metal Scrap Recycling industry. A human-machine workflow for cutting the scrap pieces will be designed and the robotic cutting solution will identify the cutting related parameters, integrating them to the motion planner. The robot will be able to identify the cutting trajectory of a metal part regardless of the complexity of the shape of the metal.