System sorting cardboard using the Zerowaste classifier and a HMI system. Video x2 speed.
Robots can provide solutions to various serious problems that the recycling industry is facing. Our lab is an awardee of a NSF Future of Work at the Human-Technology Frontier grant for utilizing robots in the waste sorting facilities. This project investigates a novel human-robot collaboration architecture to improve efficiency and profitability in the recycling industry, while re-creating recycling jobs to be safer, cleaner, and more meaningful to the workers.
The specific goal is to improve the waste sorting process, that is, the separation of mixed waste into plastics, paper, metal, glass, and non-recyclables. The workers in the materials recovery facilities (MRFs) deal with an extreme amount of clutter while identifying and sorting the waste items. You can see the operation of MRFs in the following video from the recycling company Casella Waste Systems.
In order to enable the robots to operate in such clutter, innovative solutions in robotic manipulation and object classification are required. Moreover, in order to accomplish an efficient human-robot partnership, safe robotic systems long with novel human robot collaboration schemes are needed to be designed.
This project is conducted in collaboration with Yale University, Boston University and University of Washington. Our industry partner is Casella Waste Systems. Our lab focuses on developing manipulation algorithms for waste picking and rearrangement and collecting datasets for waste recognition.
We presented the first publicly available video dataset in the literature, ZeroWaste Dataset, that is collected from an operating Materials Recovery Facility (MRF). This dataset is labeled and ready to use for developing waste detection and semantic segmentation algorithms. We also presented baseline results with the state of the art methods. For more information please see our paper CVPR paper here.

A snapshot from the Zerowaste Dataset.
We are constructed a conveyor system with robots that is used for waste recognition and picking experiments. Different than many other manipulation problems in the literature, in waste picking, we do not mind if the target object is damaged. Leveraging this aspect, we have designed grippers that can engage and disengage spikes that can latch on to some waste items for easy picking.
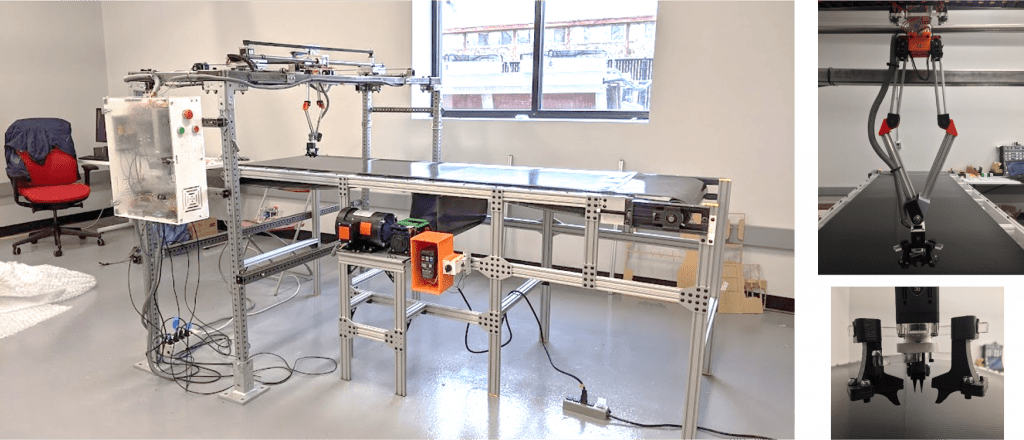
Our experimental setup for waste picking
The variety of objects on a waste conveyor line is immense. It is very challenging to develop a single picking algorithm that can handle all this variety and provide high success rates that are required in the recycling industry (99.5% in some regulations). We have designed an ensemble learning-based grasping strategy that utilizes multiple grasp detection algorithms (experts), combines their decision to obtain a final grasp. We have shown that such an approach provides better success rates than using a single expert. For more information, please visit the ensemble learning for grasping page here.

Ensemble learning scheme for robotic grasping
Our papers related to robotic waste sorting:
ZeroWaste Dataset: Towards Deformable Object Segmentation in Extreme Clutter
D. Bashkirova, M. Abdelfattah, Z. Zhu, J. Akl, F. Alladkani, P. Hu, V. Ablavsky, B. Calli, S. A. Bargal, and K. Saenko
Conference on Computer Vision and Pattern Recognition (CVPR), 2022
[Paper] [Dataset]
ECNNs: Ensemble Learning Methods for Improving Planar Grasp Quality Estimation,
F. Alladkani, J. Akl, B. Calli
IEEE International Conference on Robotics and Automation (ICRA), 2021.
[Paper] [Video]
Benchmarking Cluttered Robot Pick-and-Place Manipulation with the Box and Blocks Test,
A. S. Morgan, K. Hang, W. Bircher, F. Alladkani, A. Gandhi, B. Calli, A. M. Dollar,
IEEE Robotics and Automation Letters, 2019.
[Paper] [Supplementary] [Video]